Arduino UNO
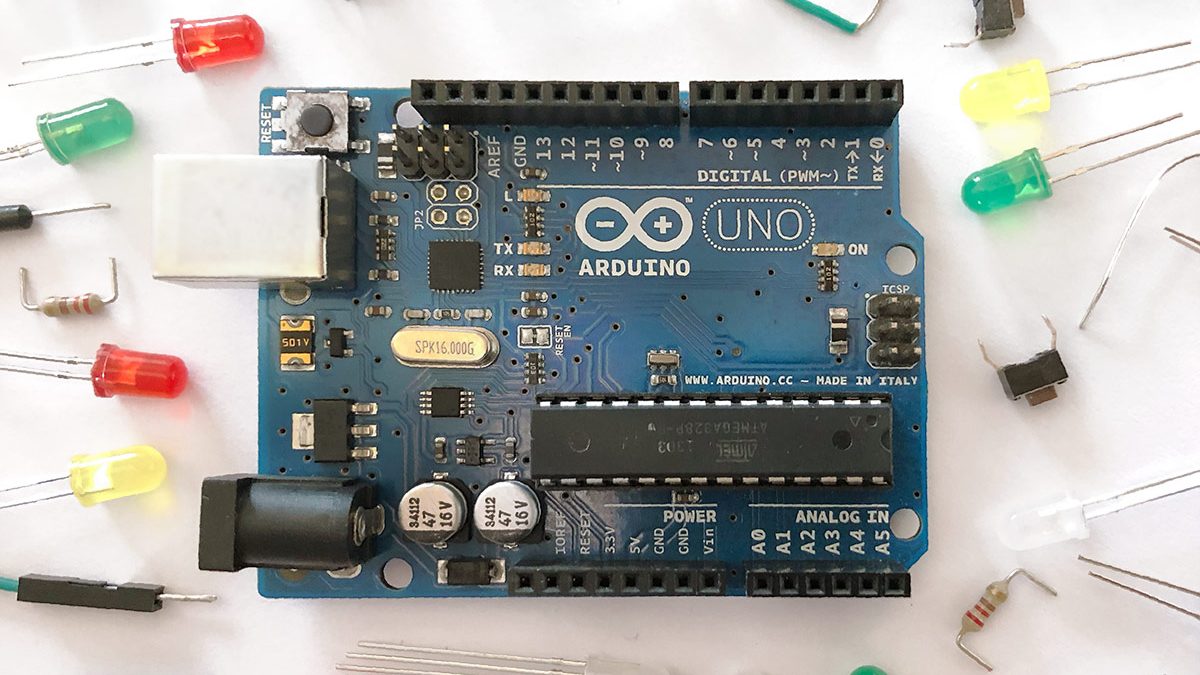
Das Arduino UNO R3 ist die aktuelle Version des Arduino UNO. Dabei handelt es sich um das Standard-Arduino. Es ist für die meisten Projekte völlig… Weiterlesen »Arduino UNO
Das Arduino UNO R3 ist die aktuelle Version des Arduino UNO. Dabei handelt es sich um das Standard-Arduino. Es ist für die meisten Projekte völlig… Weiterlesen »Arduino UNO
(Dieses Beispiel ist noch in Bearbeitung) Das Arduino-Board kann seriell mit einem angeschlossenen Computer kommunizieren. Dies ermöglicht z.B. die Steuerung von Software und ist damit… Weiterlesen »Serielle Kommunikation
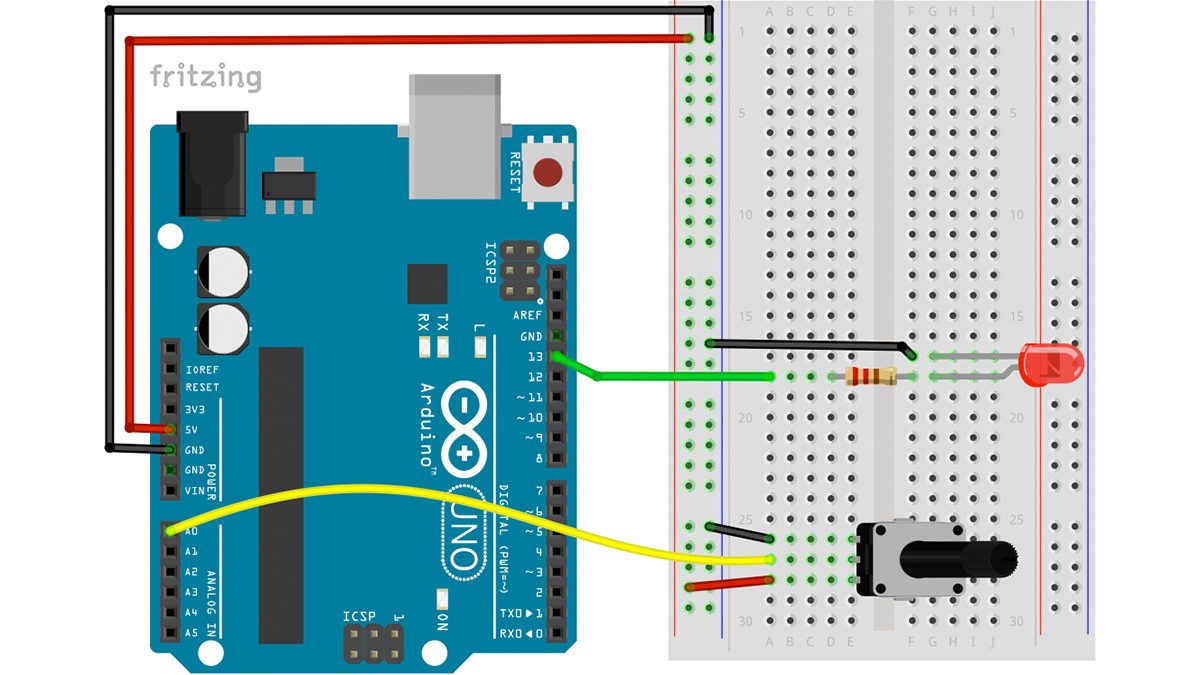
Der Analog Input vom Arduino wird verwendet, um analoge Sensoren auszulesen. Dabei handelt es sich zum Beispiel um Potentiometer, Fotowiderstände (LDR), Druck- und Temperatursensoren. Im Gegensatz… Weiterlesen »Analog Input
Sechs der digitalen Kanäle auf dem Arduino-Board sind nicht nur digital, sondern auch analog ansteuerbar. Sie sind mit dem Aufdruck PWM gekennzeichnet (Kanal 3, 5,… Weiterlesen »Analog Out
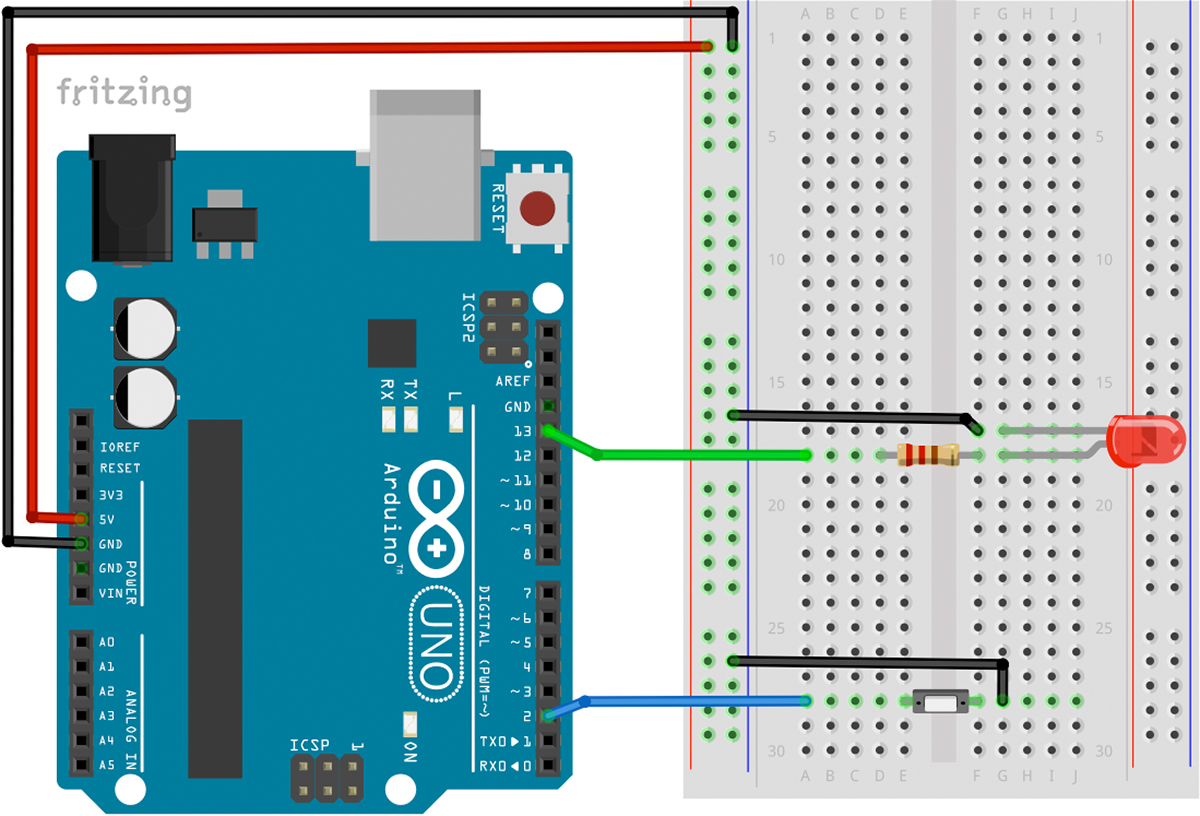
Um ein digitales Signal zu erfassen (Schalter, Taster, usw.), erweitert man die Schaltung um einen Taster. Die eine Seite des Tasters wird mit dem GND… Weiterlesen »Digital In
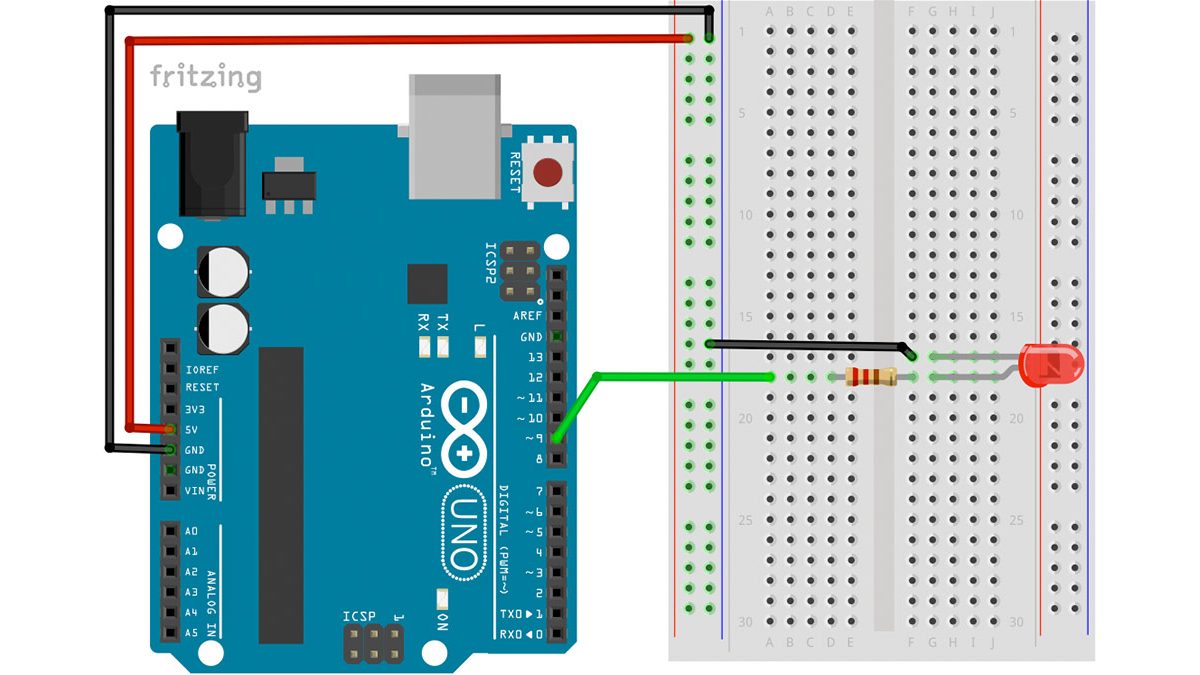
Digital Out digitalOut(); ist eine Funktion, bei der ein digitaler Kanal des Arduino-Boards, das als Output deklariert ist, ein oder ausgeschaltet werden kann. Ein- oder… Weiterlesen »Digital Out
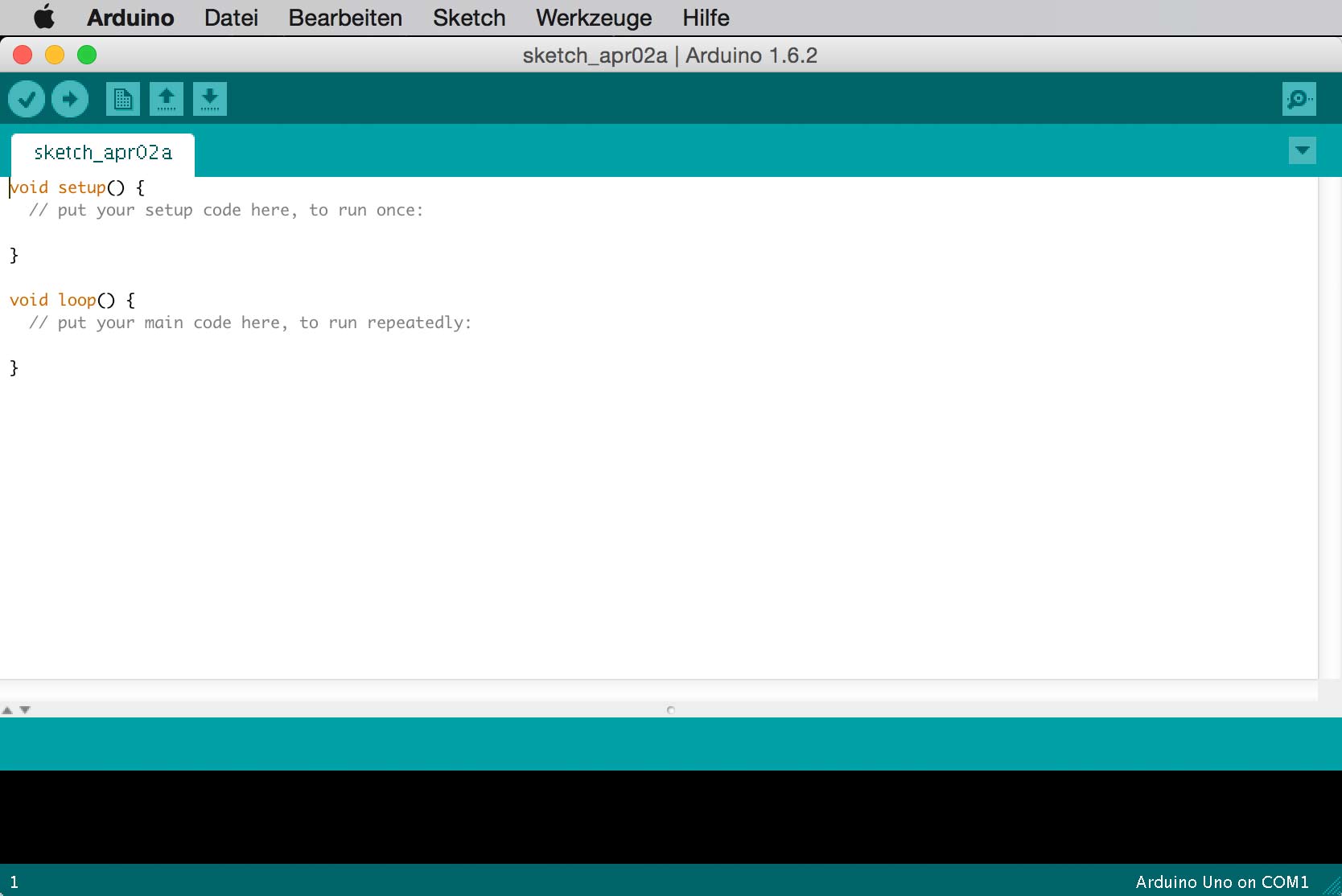
Die grundlegende Programmstruktur eines Arduino-Programms setzt sich aus zwei Methodenblöcken zusammen. Die erste Methode ist void setup(). Hier werden Grundeinstellungen (z.B. ob ein Kanal ein… Weiterlesen »Struktur eines Sketches
Die Arduino Software findet man auf http://arduino.cc/en/Main/Software. Hier kann man zwischen einer Windows, Mac OS X und Linuxversion wählen. Die Software ist komplett kostenlos. Für… Weiterlesen »Arduino Software
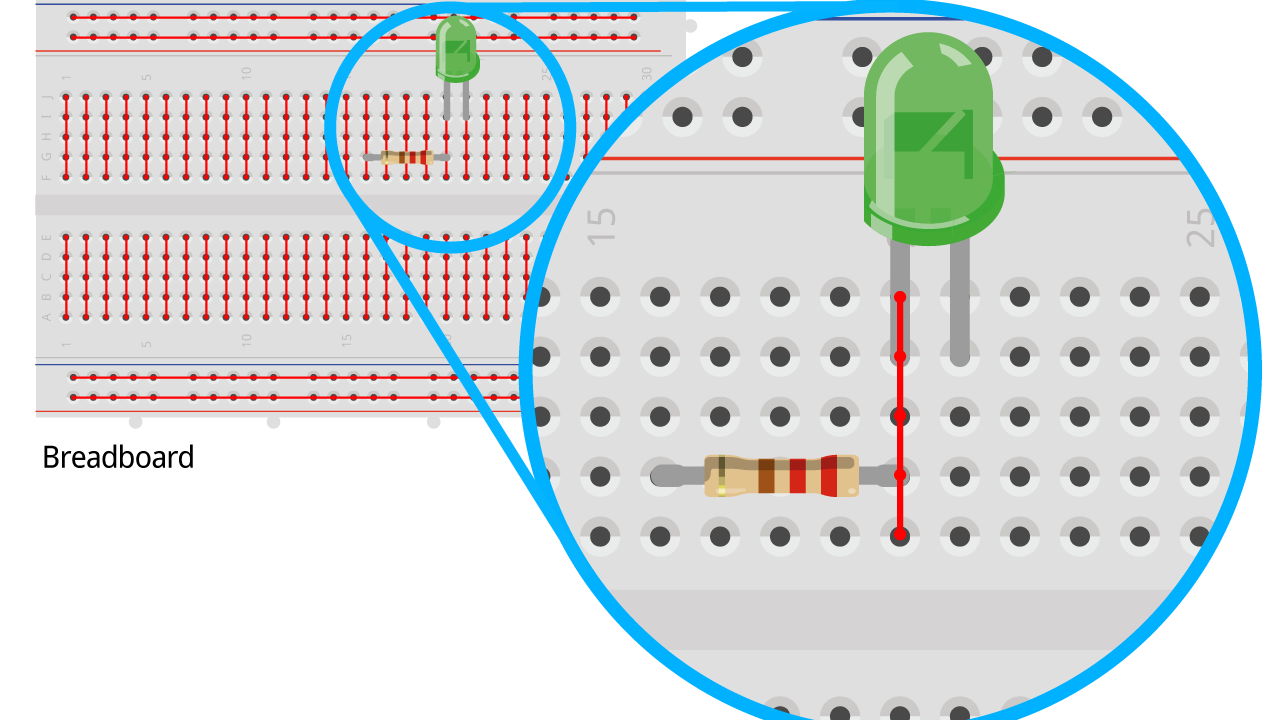
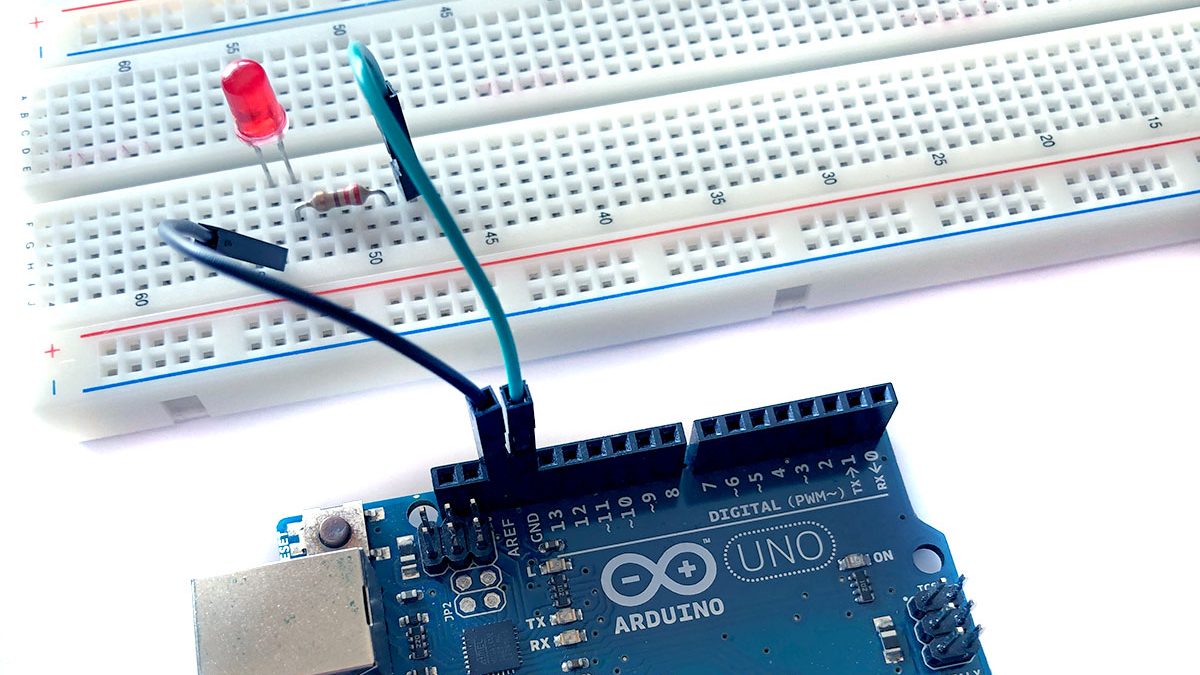
Um eine Idee schnell zu testen, kann man Breadboards (Steckbretter) zum stecken der Elektronik verwenden. Durch Löcher in einem Raster, können Bauteile mit einander verbunden… Weiterlesen »Sketching
Das IO-Board Arduino ist seit seiner ersten Veröffentlichung stetig weiter entwickelt worden. Da es sich um offene Hardware handelt (jeder darf sie nachbauen, verändern und… Weiterlesen »Arduino IO-Board
Unser professioneller Videokurs für Anfänger ist der perfekte Einstieg in die Welt von Arduino. Lerne die Grundlagen und baue deine ersten Projekte. Melde dich jetzt an und starte sofort.