Ein Schrittmotor kann präziser angesteuert werden, als ein normaler Elektromotor. Ein normaler Elektromotor dreht sich, oder er dreht sich nicht. Einfluss kann man nur auf die Geschwindigkeit und Richtung nehmen. Ein Schrittmotor dreht sich in kleinen Schritten (steps). Die Anzahl der Schritte, die ein Schrittmotor pro Umdrehung machen kann, hängt von seiner Bauart ab. Die Schritte werden entweder als Schritte / steps angegeben, oder als ein Grad-Maß. 9° bedeutet, dass der Motor pro Umdrehung 40 einzelne Schritte macht (360° / 9° = 40).
Jeder einzelne Schritt des Schrittmotors muss vom Arduino-Board gesendet werden. Das bedeutet, dass man eine genaue Schrittanzahl vorgeben kann, um die sich der Motor drehen soll.
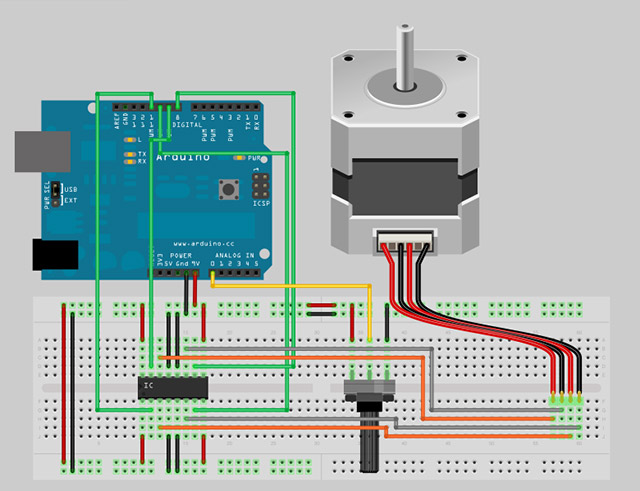
Ein bipolarer Schrittmotor hat in der Regel vier Anschlusskabel, die im inneren mit den Elektromagneten des Motors verbunden sind. Da man die Magnetfelder umpolen können muss, benötigt man für einen Schrittmotor mit vier Anschlusskabeln zwei H-Brücken. Im Beispiel ist die Ansteuerung mit einem IC L293D realisiert.
Ein unipolarer Schrittmotor hat fünf oder sechs Anschlusskabel. Im Inneren befinden sich im einfachsten Fall vier Elektromagneten (normalerweise aber natürlich ein Vielfaches von vier). Jeder Elektromagnet hat ein eigenes Anschlusskabel – macht schon mal vier – und teilt sich das andere entweder mit einem oder allen drei anderen Elektromagneten. Das macht in der Summe also fünf oder sechs Anschlüsse insgesamt. Um ihn zu betreiben, schließt man das gemeinsame (oder die beiden gemeinsamen) Kabel in den GND und schaltet z.B. über eine H-Brücke die einzelnen Magneten ein und aus. So dreht sich der Motor Schritt für Schritt.
Schrittmotoren findet man z.B. in Druckern, CD- und Diskettenlaufwerken.
Wenn dir das Projekt gefallen hat und du von weiteren interessanten Projekten inspiriert werden willst, sieh dir doch mal mein neues E-Book »Arduino Projekte Volume 1« an!
- Die beliebtesten Arduino-Projekte von StartHardware
- Inklusive Schaltplan, Beschreibung und Code
- Arduino-Schnellstart-Kapitel
- Kompakter Programmierkurs
Hallo Udo,melde mich erst jetzt weil mir der Beitrag irgendwie durch die Lappen gegnagen ist.Wfcrde mich aber auch gerne an dem Gewinnspiel beteiligen und versuche deshalb jetzt mal zu erle4utern warum gerade ich so ein Shield gebrauchen kf6nnte.* Tre4nendrfcse an*Es ist so das mir die ganze Sache unheimlich Spadf macht! Ich spiele viel und gerne mit dem Arduino. Ich habe nur ein ganz grodfes Problem:Programmiert bekomme ich schon einiges (mit viel gefrickel) nur leider bin ich anscheint unfe4hig Hardware her zu stellen.Meine LED-Uhr lief super bis ich versucht habe sie in ein Gehe4use zu bauen SchrottMeine Waage-Auswertung mit wLan und MySQL-Datenbank klappte super bis ich versucht habe dies in die Waage zu integrieren Jetzt ist die Waage kaputMein DCF77-Shield ist in Arbeit. Programmierung ist schon ganz ok wenn es jetzt mit der Hardware wieder nicht klappt dreh ich durch.Aus diesem Grund versuche ich ffcr alles was ich entwickeln will um damit zu Programmieren Shields zu bekommen um zu verhindern das ich etwas bauen muss.LEDs sind numal das Spielzeug Nummer 1. Und Laufschriften erstellen das wfcrde mich noch mal reizen.Deshalb wfcrde ich mich freuen so ein Modul zu besitzen wo ich wieder mal nur ums programmieren kfcmmern muss weil die Hardware schon perfekt funktioniert und kein Bastelwerk ist.*Tre4nendrfcse aus*Naja das ist der Grund warum ich heidf auf Shields bin und im besonderen auf das Blinkenlight.Danke ffcrs zuhf6ren/lesenMit freundlichen und vor allem Weihnachtlichen GrfcdfenThorsten
Hallo,
ich arbeite gerade an einem Projekt bei dem ich 2 Achsen ansteuern soll. Auf den zwei Achsen soll die Masse ein Obiektes in Länge und Breite gemessen werden. Nach der Messung soll ein 2D Bild, von z.b. einer BASLER ACE Flächenkamera gemacht werden. Anschlissend sollen die Daten an eine Datenbank gesendet werden und das zutreffende Objekt auf einem Monitor angezeigt werden.
Jetzt meine Frage, welche Bauteile würde ich benötigen um dieses Projekt zu erstellen?
Danke im Voraus
Theo
Hallo, habe auch bei Arduino gelesen, dass man Schrittmotoren nur mit einer externen Stromversorgung betreiben kann. Das stimmt wohl für größere Motoren oder wenn man mehr Verbraucher anschließt. Ein einzelner Schrittmotor geht ohne Probleme mit den 5V vom Arduino-Board, wie oben auf dem Plan! Siehe z.B. http://youtu.be/XOkTT8cVOcU (ab 0:30). Ich hatte sogar mit einer externen Stromversorgung (12V Netzteil) mehr Probleme, da das Schrittmotor-IC sehr schnell sehr heiß wurde und dann nicht mehr korrekt arbeitete. Mein eigentlich 12V-Motor http://www.conrad.de/ce/de/product/198398/ läuft problemlos nun auch mit der Schaltung oben und den 5V vom Arduino-Board.
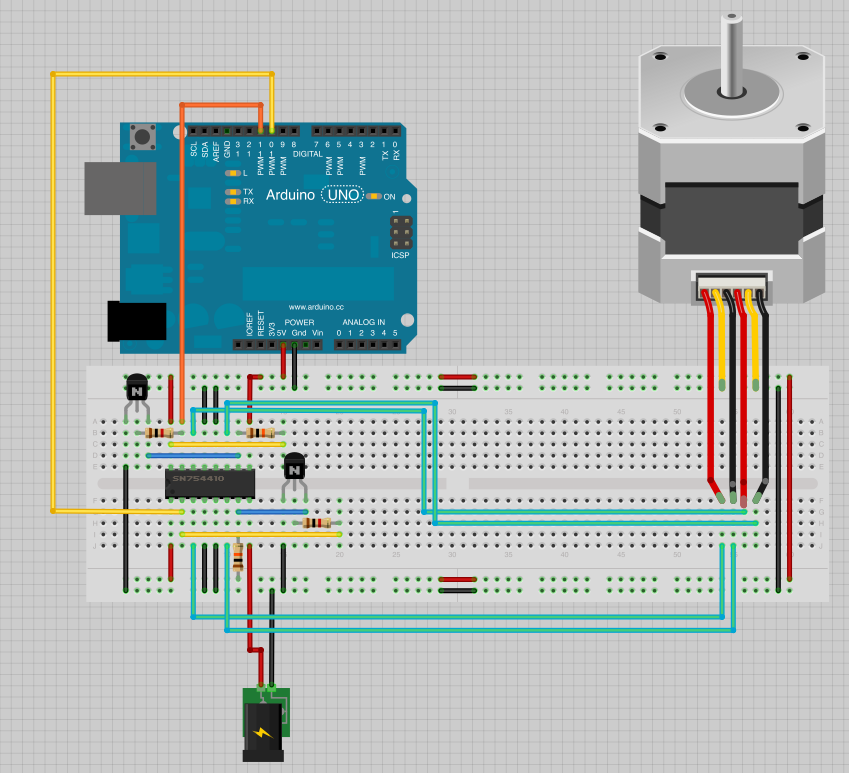
Den Schaltplan für eine externe Stromversorgung gibt es unter http://www.arduino.cc/en/Tutorial/MotorKnob wie gesagt wurde das IC bei mir aber sehr heiß und arbeitetete nicht mehr richtig. Alternativ kann man wohl das IC SN764410NE als H-Bridge verwenden, das etwas mehr verträgt, allerdings hätte das andere Nachteile (finde leider gerade die Quelle nicht).
http://www.conrad.de/ce/de/product/198398/
Wäre auch dankbar zu sehen wie das mit externer Stromversorgung ausieht. Ich habe zwei unipolare Stepper(Schrittmototren) aus einem Drucker und scanner ausgebaut die brauch soweit ich weiß 9-12v. Ich würde mich freuen wenn du mir weiterhelfen könntest.
LG
Und wenn ja was für eins genau da gibt’s ja verschiedene und kann ich mir das aus einem alten laptopnetzteil bauen ?? Lg
Hi ist das die Schaltung für unipolar oder bipolar? Denn ich hab mir einen unipolar 3,6 grad Stepper besorgt und da steht drauf 24 v und ka wie viel mA brauch ich da noch eine externe Spannungsversorgung oder kann ich das wie diesen Schaltplan aufbauen ? Lg Berni
vielleicht sollte man noch ergänzen das der Strom vom Arduino nicht dazu ausreicht den Motor zu bewegen.
Wenn das mit einem Shield ergänzen könntest?
Die Kommentarfunktion ist deaktiviert.