Herzlich Willkommen bei StartHardware! Auf diesen Seiten findest du Tutorials und Projekte rund um Arduino. Du willst LEDs blinken lassen? Motoren steuern und deine Liebsten beeindrucken? Dann bist du hier genau richtig!
Arduino ist eine Mikrocontroller-Plattform die aus der Programmierumgebung – der Arduino IDE – und dem Mikrocontroller-Board – dem Arduino-Board – besteht. Dazu gibt es eine weltweite Community an Arduino-Freunden, die Informationen wie z. B. auf dieser Website zusammenträgt und erweitert. Ich hoffe, du hast an Arduino genau so viel Spaß wie ich!
Bist du Anfänger? Dann sieh dir die Arduino-Anleitung an. Dabei handelt es sich um einen kompletten Einsteigerkurs. Technische Hinweise findest du oben unter dem Menüpunkt Tutorials und natürlich gibt es hier eine Vielzahl an Arduino-Projekten.
Auszug der Arduino-Projekte
- Arduino-Projekt: Kastanienmännchen mit leuchtenden Augen

 Es ist Herbst und die Kastanien fallen auf die Autos. Höchste Zeit, etwas Sinnvolles… Weiterlesen »Arduino-Projekt: Kastanienmännchen mit leuchtenden Augen
Es ist Herbst und die Kastanien fallen auf die Autos. Höchste Zeit, etwas Sinnvolles… Weiterlesen »Arduino-Projekt: Kastanienmännchen mit leuchtenden Augen - Arduino Carrera-Bahn Projekt – Rundenzeit Counter mit LCD
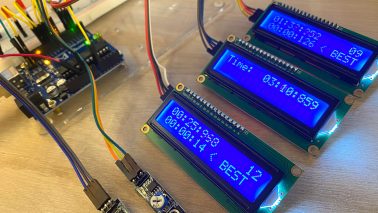 Ich weiß nicht, wie das bei euch ist, aber sobald dicke Regenschwaden über das… Weiterlesen »Arduino Carrera-Bahn Projekt – Rundenzeit Counter mit LCD
Ich weiß nicht, wie das bei euch ist, aber sobald dicke Regenschwaden über das… Weiterlesen »Arduino Carrera-Bahn Projekt – Rundenzeit Counter mit LCD - Arduino Puppenhaus-Beleuchtung mit Sound
 In diesem Arduino-Projekt bringen wir Beleuchtung und Sound in jedes Puppenhaus! Mit einem System… Weiterlesen »Arduino Puppenhaus-Beleuchtung mit Sound
In diesem Arduino-Projekt bringen wir Beleuchtung und Sound in jedes Puppenhaus! Mit einem System… Weiterlesen »Arduino Puppenhaus-Beleuchtung mit Sound - Leuchtende Ostereier mit Arduino
 Bald ist es wieder so weit. Fleißige Osterhasen hoppeln durch die Wohnung und den… Weiterlesen »Leuchtende Ostereier mit Arduino
Bald ist es wieder so weit. Fleißige Osterhasen hoppeln durch die Wohnung und den… Weiterlesen »Leuchtende Ostereier mit Arduino - Nachtlicht mit Arduino
 Jonas hat mir geschrieben und gefragt, wie man eine LED per Fotowiderstand dimmen könnte.… Weiterlesen »Nachtlicht mit Arduino
Jonas hat mir geschrieben und gefragt, wie man eine LED per Fotowiderstand dimmen könnte.… Weiterlesen »Nachtlicht mit Arduino - RailFX Kirche mit Arduino Nano
 Michael schreibt: »[…] Meine Frage ist, ob es bei dem Soundmodul die Möglichkeit gibt,… Weiterlesen »RailFX Kirche mit Arduino Nano
Michael schreibt: »[…] Meine Frage ist, ob es bei dem Soundmodul die Möglichkeit gibt,… Weiterlesen »RailFX Kirche mit Arduino Nano - Arduino-Schranke mit Zähler für den Modellbau-Parkour
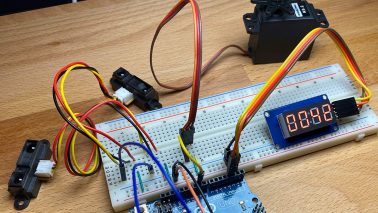 Harald betreibt eine Modellbau-Halle in Österreich und möchte gern eine Schranke für Modellbau-LKWs haben,… Weiterlesen »Arduino-Schranke mit Zähler für den Modellbau-Parkour
Harald betreibt eine Modellbau-Halle in Österreich und möchte gern eine Schranke für Modellbau-LKWs haben,… Weiterlesen »Arduino-Schranke mit Zähler für den Modellbau-Parkour - RailFX: Sound-Modul mit Arduino
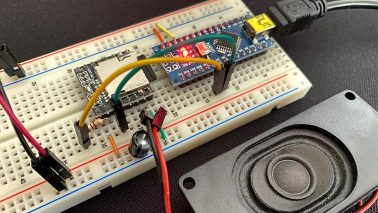 Dieses Sound-Modul mit Arduino des RailFX-Systems spielt MP3 und WAV Dateien von einer SD-Karte ab. Über… Weiterlesen »RailFX: Sound-Modul mit Arduino
Dieses Sound-Modul mit Arduino des RailFX-Systems spielt MP3 und WAV Dateien von einer SD-Karte ab. Über… Weiterlesen »RailFX: Sound-Modul mit Arduino - RailFX: Arduino Zugzielanzeiger mit Live-Daten der Deutschen Bahn
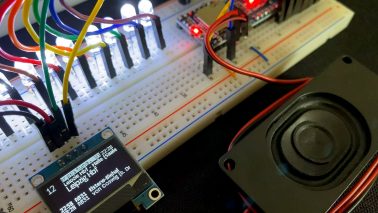
 RailFX: Arduino Zugzielanzeiger – Dieses Modul des RailFX-Systems zeigt Live-Daten eines einstellbaren Bahnhofes auf OLED-Displays als… Weiterlesen »RailFX: Arduino Zugzielanzeiger mit Live-Daten der Deutschen Bahn
RailFX: Arduino Zugzielanzeiger – Dieses Modul des RailFX-Systems zeigt Live-Daten eines einstellbaren Bahnhofes auf OLED-Displays als… Weiterlesen »RailFX: Arduino Zugzielanzeiger mit Live-Daten der Deutschen Bahn - Arduino: RailFX-Baustellen- und Industriemodul
 Das RailFX-Baustellen- und Industriemodul des RailFX-Systems ist für den Einsatz in Baustellen oder Industrieanlagen konzipiert und… Weiterlesen »Arduino: RailFX-Baustellen- und Industriemodul
Das RailFX-Baustellen- und Industriemodul des RailFX-Systems ist für den Einsatz in Baustellen oder Industrieanlagen konzipiert und… Weiterlesen »Arduino: RailFX-Baustellen- und Industriemodul - Kaugummiautomat mit Arduino, RGB-LEDs und Sound
 Heute freue ich mich besonders, das Projekt eines Arduino-Mitstreiters vorzustellen. Martin war auf der… Weiterlesen »Kaugummiautomat mit Arduino, RGB-LEDs und Sound
Heute freue ich mich besonders, das Projekt eines Arduino-Mitstreiters vorzustellen. Martin war auf der… Weiterlesen »Kaugummiautomat mit Arduino, RGB-LEDs und Sound - RailFX: Arduino Bahnhof
 Dieses Modul des RailFX-Systems steuert einen Arduino Bahnhof für die Modellbahn. Zu den Funktionen zählten: Schaltplan… Weiterlesen »RailFX: Arduino Bahnhof
Dieses Modul des RailFX-Systems steuert einen Arduino Bahnhof für die Modellbahn. Zu den Funktionen zählten: Schaltplan… Weiterlesen »RailFX: Arduino Bahnhof